SCARA ROBOTIC ARMS - Z-Arm-2442B Kev Sib Koom Tes Robotic Arm



Pawg Tseem Ceeb
Kev lag luam neeg hlau caj npab / Kev koom tes neeg hlau caj npab / Hluav taws xob gripper / Intelligent actuator / Automation kev daws teeb meem
Daim Ntawv Thov
SCIC Z-Arm cobots yog cov neeg hlau sib koom tes 4-axis uas sib zog thiab muaj lub cev muaj zog tsav uas tsim sab hauv, thiab tsis tas yuav muaj cov reducers zoo li lwm cov scara ib txwm muaj, txo tus nqi los ntawm 40%. SCIC Z-Arm cobots tuaj yeem ua tiav cov haujlwm suav nrog tab sis tsis txwv rau 3D printing, kev tuav cov khoom siv, kev vuam, thiab laser engraving. Nws muaj peev xwm txhim kho qhov ua tau zoo thiab kev ywj pheej ntawm koj txoj haujlwm thiab kev tsim khoom.
Cov yam ntxwv

Kev Ntsuas Siab
Rov ua dua tau
±0.02 hli
Kev Thauj Khoom Loj
5kg
Caj Npab Loj
JI axis 220mm
J2 axis 200 hli
Tus nqi sib tw
Kev lag luam zoo
Ctus nqi sib tw
Cov Khoom Sib Xws



Cov Lus Qhia Txog Kev Ntsuas
Lub SCIC Z-Arm 2442B yog tsim los ntawm SCIC Tech, nws yog lub tshuab sib koom tes uas sib zog thiab tsis hnyav, yooj yim rau kev teeb tsa thiab siv, txhawb nqa SDK. Tsis tas li ntawd xwb, nws txhawb nqa kev kuaj pom kev sib tsoo, uas yog, nws yuav nres tsis siv neeg thaum kov tib neeg, uas yog kev sib koom tes ntse ntawm tib neeg thiab tshuab, kev ruaj ntseg siab.
| Z-Arm 2442B Kev Koom Tes Neeg Hlau caj npab | Cov Kev Cai |
| 1 axis caj npab ntev | 220 hli |
| 1 lub kaum sab xis tig | ±90° |
| 2 axis caj npab ntev | 200 hli |
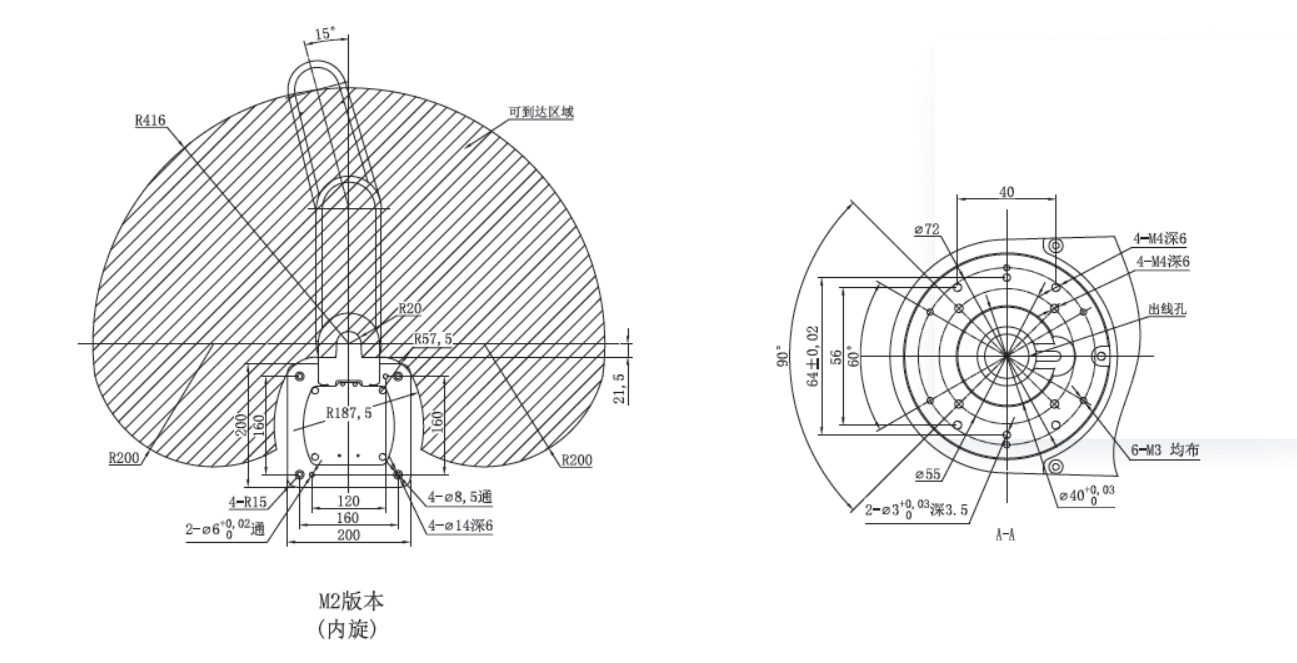
| Lub kaum sab xis tig 2 axis | ±164° (Yeem xaiv tau: 15-345deg) |
| Z axis stroke | 240 (Qhov siab tuaj yeem hloov kho) |
| R axis tig ntau yam | ±1080° |
| Kev ceev ceev | 1600mm/s (thauj khoom 4kg) |
| Rov ua dua tau | ±0.02 hli |
| Tus nqi thauj khoom txheem | 4kg |
| Qhov siab tshaj plaws ntawm kev thauj khoom | 5kg |
| Qib ntawm kev ywj pheej | 4 |
| Kev muab hluav taws xob | 220V/110V50-60HZ hloov kho rau 48VDC lub zog siab tshaj plaws 200W |
| Kev sib txuas lus | Ethernet |
| Kev nthuav dav | Cov cuab yeej tswj kev txav mus los uas ua ke muab 24 I/O + kev nthuav dav hauv qab caj npab |
| Z-axis tuaj yeem hloov kho qhov siab | 0.1m-0.5m |
| Z-axis rub qhia | / |
| Hluav taws xob interface tseg | Kev teeb tsa tus qauv: 24 * 23awg (tsis muaj kev tiv thaiv) cov xov hlau los ntawm lub vaj huam sib luag qhov (socket) los ntawm lub hau caj npab qis dua Yeem xaiv tau: 2 φ4 lub raj nqus tsev los ntawm lub vaj huam sib luag thiab flange |
| Cov grips hluav taws xob HITBOT sib xws | E-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EF-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100 |
| Lub teeb ua pa | / |
| Qhov ntau thiab tsawg ntawm kev txav mus los ntawm sab caj npab thib ob | Txheem: ±164° Yeem xaiv tau: 15-345deg |
| Cov khoom siv xaiv tau | / |
| Siv ib puag ncig | Kub ib puag ncig: 0-45 ° C Av noo: 20-80% RH85 (tsis muaj te) |
| I/O chaw nres nkoj digital input (cais tawm) | 9 + 3 + forearm extension (yeem xaiv tau) |
| I/O chaw nres nkoj digital output (cais tawm) | 9 + 3 + forearm extension (yeem xaiv tau) |
| I/O chaw nres nkoj analog input (4-20mA) | / |
| I/O chaw nres nkoj analog tso zis (4-20mA) | / |
| Qhov siab ntawm caj npab neeg hlau | 683 hli |
| Qhov hnyav ntawm caj npab neeg hlau | 240 hli stroke net hnyav 27 kg |
| Qhov loj ntawm lub hauv paus | 250mm * 250mm * 15mm |
| Qhov nrug ntawm cov qhov kho lub hauv paus | 200mm * 200mm nrog plaub lub M8 * 20 ntsia hlau |
| Kev kuaj pom kev sib tsoo | √ |
| Kev qhia rub | √ |
Kev Tawm Tsam M1 Version (Tig Sab Nraud)
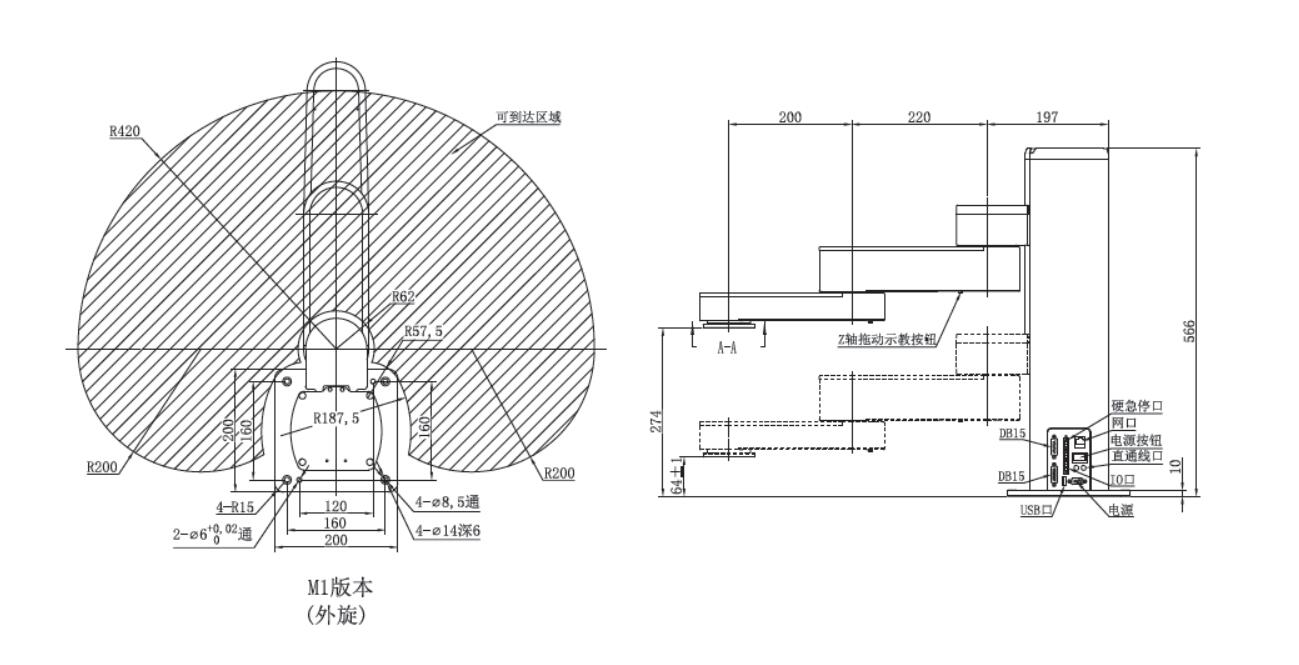
Kev Taw Qhia Txog Kev Sib Txuas Lus

Lub Z-Arm 2442 robot arm interface tau teeb tsa rau hauv 2 qhov chaw, sab ntawm lub hauv paus robot arm (txhais tias yog A) thiab sab nraub qaum ntawm qhov kawg ntawm caj npab. Lub vaj huam sib luag ntawm A muaj lub qhov hluav taws xob hloov pauv (JI), 24V lub zog muab hluav taws xob interface DB2 (J2), tso zis rau tus neeg siv I/O chaw nres nkoj DB15 (J3), tus neeg siv nkag I/O chaw nres nkoj DB15 (J4) thiab cov nyees khawm teeb tsa chaw nyob IP (K5). Ethernet chaw nres nkoj (J6), system input/output chaw nres nkoj (J7), thiab ob lub qhov (socket) 4-core ncaj nraim J8A thiab J9A.
Cov kev ceev faj
1. Kev them nqi inertia
Qhov chaw nruab nrab ntawm lub ntiajteb txawj nqus thiab qhov ntau ntawm qhov chaw thauj khoom pom zoo nrog Z axis txav mus los inertia tau qhia nyob rau hauv Daim Duab 1.

Daim Duab 1 XX32 series payload piav qhia
2. Lub zog sib tsoo
Lub zog ua rau muaj kev tiv thaiv kev sib tsoo kab rov tav: lub zog ntawm XX42 series yog 40N.
3. Z-axis sab nraud quab yuam
Lub zog sab nraud ntawm Z axis yuav tsum tsis pub tshaj 120N.

Daim Duab 2
4. Cov lus qhia rau kev teeb tsa ntawm kev hloov kho Z axis, saib Daim Duab 3 kom paub meej ntxiv.

Daim Duab 3
Lus Ceeb Toom:
(1) Rau kev hloov kho Z-axis nrog lub stroke loj, Lub zog ntawm Z-axis txo qis thaum lub stroke nce ntxiv. Thaum lub stroke Z-axis tshaj qhov pom zoo, tus neeg siv muaj qhov yuav tsum tau ua kom nruj, thiab qhov ceev yog > 50% ntawm qhov ceev tshaj plaws, nws raug pom zoo kom teeb tsa kev txhawb nqa tom qab Z-axis kom ntseeg tau tias lub zog ntawm lub caj npab neeg hlau ua tau raws li qhov yuav tsum tau ua ntawm qhov ceev ceev.
Tus nqi pom zoo yog raws li nram no: Z-ArmXX42 series Z-axis stroke >600mm
(2) Tom qab Z-axis stroke nce ntxiv, qhov ntsug ntawm Z-axis thiab lub hauv paus yuav raug txo qis heev. Yog tias qhov yuav tsum tau ua kom nruj rau Z-axis thiab lub hauv paus siv tsis tau, thov sab laj nrog cov neeg ua haujlwm kev tshaj lij sib cais.
5. Txwv tsis pub siv cov xov hluav taws xob kub. Ceeb toom rov qab thaum cov ncej zoo thiab cov ncej tsis zoo ntawm lub hwj chim raug txiav tawm.
6. Tsis txhob nias lub caj npab kab rov tav thaum lub hwj chim kaw.

Daim Duab 4
Cov Lus Qhia Txog Kev Txuas DB15

Daim Duab 5
Tus qauv pom zoo: Txiv neej kub plated nrog ABS plhaub YL-SCD-15M Poj niam kub plated nrog ABS plhaub YL-SCD-15F
Loj piav qhia: 55mm * 43mm * 16mm
(Saib Daim Duab 5)
Rooj Sib Txuas Lus Sib Xws Nrog Neeg Hlau Tes
| Neeg Hlau Caj Npab Qauv No. | Cov Grippers Sib Xws |
| XX42 T1 | Z-EFG-8S NK/Z-EFG-12 NK/Z-EFG-20 NM NMA/Z-EFG-20S/ Z-EFG-30NM NMA Lub tshuab luam ntawv 3D thib 5 |
| XX42 T2 | Z-EFG-50 ALL/Z-EFG-100 TXA |
Daim Duab Qhia Txog Qhov Loj Ntawm Kev Teeb tsa Adapter Fais Fab
XX42 kev teeb tsa 24V 500W RSP-500-SPEC-CN fais fab mov

Daim duab qhia txog qhov chaw siv sab nraud ntawm Lub Caj Npab Neeg Hlau

Peb Txoj Kev Lag Luam







