HITBOT HLUAV TAWG HLUAV TAWG SERIES – Z-ECG-10 Peb-ntiv tes Hluav Taws Xob Gripper




Pawg Tseem Ceeb
Kev lag luam neeg hlau caj npab / Kev koom tes neeg hlau caj npab / Hluav taws xob gripper / Intelligent actuator / Automation kev daws teeb meem
Daim Ntawv Thov

Feature

·Kev kuaj pom qhov poob ntawm clamp, qhov chaw tso zis muaj nuj nqi
·Lub zog, qhov chaw, kev tswj ceev, kev tswj kom meej ntawm Modbus
·Peb tus ntiv tes nruab nrab gripper
·Built-in maub los: me me, yooj yim koom ua ke
·Hom kev tswj: 485 (Modbus RTU), I/O
Peb-Ntiv Tes Hluav Taws Xob Gripper Yooj yim rau Clamp cov khoom kheej kheej
Kev Ua Haujlwm Zoo
Lub zog clamping: 3-10N,
Kev Siv Zog Siab
Kev Tswj Xyuas Kom Tseeb
Nws tuaj yeem tswj tau los ntawm Modbus
Ntse rau kev tawm tswv yim
Nws muaj qhov ua haujlwm pf clamping poob nrhiav kom pom thaj chaw tso zis.
Tus maub los ua ke
Qhov chaw me me, yooj yim rau kev sib koom ua ke.
Hom Kev Tswj Ntau Yam
Kev txhawb nqa 485 (Modbus) I / O
Peb-Ntiv Tes Gripper
Peb-ntiv tes rau clamp, tsim rau ntau lub sijhawm




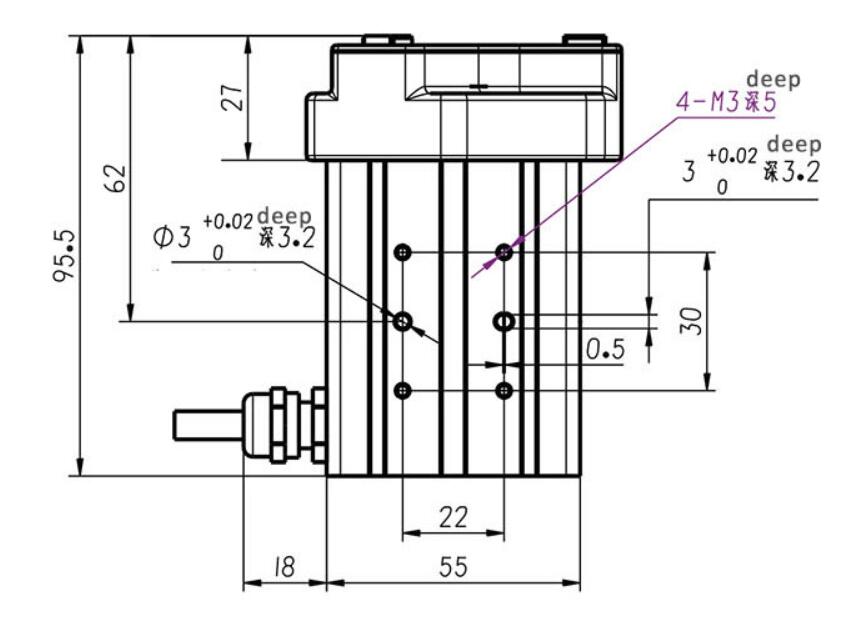
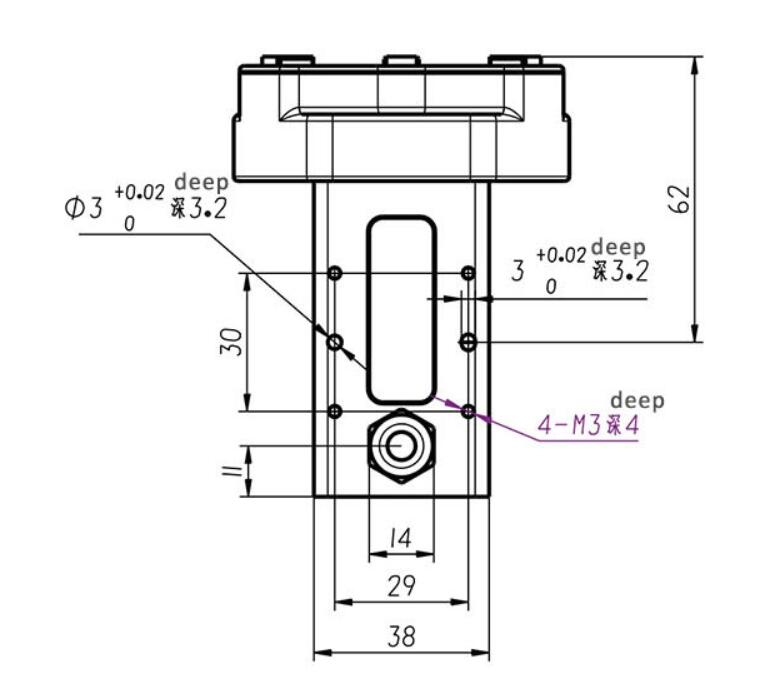
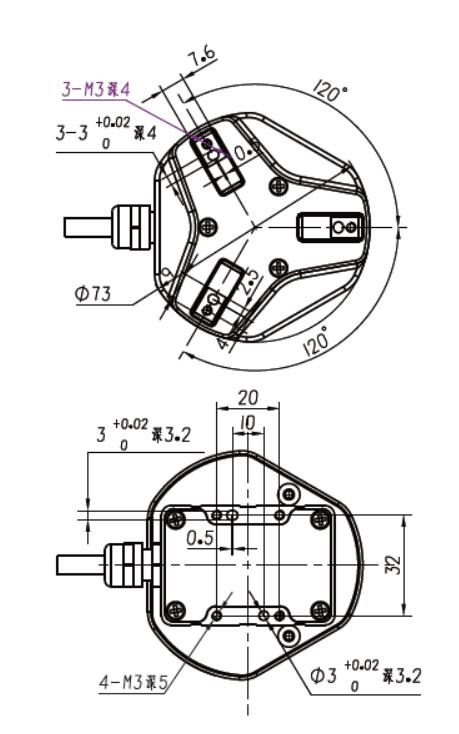
Cov Lus Qhia Txog Kev Ntsuas
| Qauv No. Z-ECG-10 | Cov Kev Cai |
| Tag Nrho mob stroke | 10 hli |
| Lub zog tuav | 3-10N |
| Rov ua dua tau | ±0.03 hli |
| Qhov hnyav tuav uas pom zoo | Qhov siab tshaj plaws 0.2kg |
| Kev Kis hom | Rack thiab Pinion + Pob Qhia Rail |
| Kev ua kom cov roj rov qab zoo ntawm cov khoom txav mus los | Txhua rau lub hlis lossis 1 lab qhov kev txav mus los / lub sijhawm |
| Lub sijhawm txav mus los ib txoj kev | 0.3 vib nas this |
| Qhov kub thiab txias ua haujlwm ntau yam | 5-55 ℃ |
| Kev ua haujlwm ntawm cov av noo | RH35-80(Tsis muaj te) |
| Blacklash | Ib sab: 0.2 hli |
| Kev tswj hwm mob stroke | Kho tau |
| Kev kho lub zog clamping | Kho tau |
| Qhov hnyav | 0.5kg |
| Qhov Loj(Ntev*Dav*Siab) | 73 * 73 * 95.5 hli |
| Qib Kev Tiv Thaiv | IP20 |
| Hom lub cev muaj zog | Servo Fais Fab Tsav Tsheb |
| Qhov Siab Tshaj Plaws Tam Sim No | 0.6A |
| Qhov ntsuas hluav taws xob | 24V ± 10% |
| Tam sim no sawv ntsug | 0.3A |
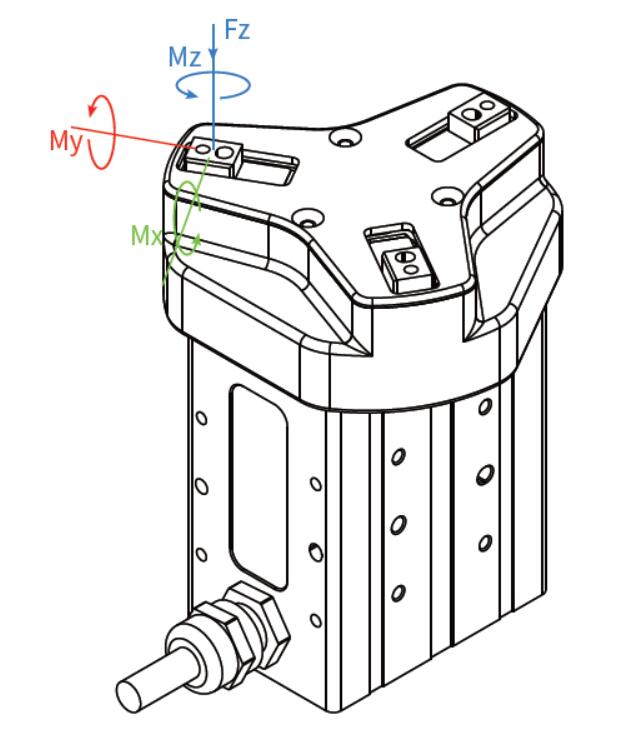
| Kev thauj khoom zoo li qub uas raug tso cai hauv kev taw qhia ntsug | |
| Fz: | 70N |
| Lub zog tso cai | |
| Mx: | 0.64 Nm |
| Kuv li: | 0.4 Nm |
| Mz: | 0.48 Nm |
Kev Ntsuas Qhov Tseeb, Peb Tus Ntiv Tes Gripper
Z-ECG-10 peb tus ntiv tes hluav taws xob gripper, nws qhov rov ua dua yog ± 0.03 hli, nws yog peb tus ntiv tes los clamp, thiab nws muaj lub luag haujlwm ntawm clamping poob nrhiav, thaj chaw tso zis, uas tuaj yeem zoo dua rau clamp cov khoom kheej kheej.


Tswjhwm Ua Hauv, Kev Sib Koom Siab
Kev tiv thaiv zoo heev rau kev thauj khoom ntau dhau tam sim ntawd, kom ntseeg tau tias lub tshuab hluav taws xob tsis muaj kev nres lossis lwm yam xwm txheej tsis zoo. Nws yog tus maub los ua ke, lub zog, ntsis thiab qhov ceev tuaj yeem tswj tau, nws npog qhov chaw ua haujlwm me me, yooj yim rau kev sib koom ua ke.
Duab Me Me, Yooj Yim Rau Nruab

Z-ECG-10 yog siv hom kev sib kis ntawm khib thiab pinion + linear guide, nws qhov loj yog L73 * W73 * H109, qhov hnyav tsuas yog 0.65kg, nws cov qauv yog compact, txhawb ntau hom kev teeb tsa, yooj yim ua tiav ntau yam haujlwm clamping.


Ceev nrooj teb, Kev Tswj Xyuas Lub Zog Tseeb
Lub sijhawm luv tshaj plaws yog 0.3s, lub zog clamping yog 3-10N, lub zog clamping yog 10 hli, qhov hnyav yog li 0.2kg, uas tuaj yeem ua tiav qhov raug siab rau clamp.
Ntau Hom Kev Tswj, Yooj Yim Rau Kev Ua Haujlwm

Z-ECG-10 tuaj yeem tswj tau qhov tseeb los ntawm Modbus, nws yooj yim rau kev faib tawm, siv kev sib txuas lus ntawm Digital I / O, tsuas yog xav tau ib txoj hlua txuas ON / OFF, nws kuj sib xws nrog PLC lub kaw lus tswj hwm tseem ceeb.

Qhov Chaw Thauj Khoom ntawm Lub ntiajteb txawj nqus Offset
Peb Txoj Kev Lag Luam


Pawg khoom
-

HITBOT ELECTRIC GRIPPER SERIES Z-EFG-26 Paral...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER PGC SERIES –...
-

HITBOT HLUAV TAWG GRIPPER SERIES – Z-EFG-FS Colla...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER PGE SERIES –...
-

HITBOT ELECTRIC GRIPPER SERIES Z-EFG-20 Paral...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER PGE SERIES –...