HITBOT HLUAV TAWG HLUAV TAWG SERIES - Z-EFG-C35 Kev Koom Tes Hluav Taws Xob Gripper




Pawg Tseem Ceeb
Kev lag luam neeg hlau caj npab / Kev koom tes neeg hlau caj npab / Hluav taws xob gripper / Intelligent actuator / Automation kev daws teeb meem
Daim Ntawv Thov
SCIC Z-EFG series robot grippers yog me me nrog lub servo system ua ke, uas ua rau nws muaj peev xwm ua tiav kev tswj hwm qhov ceev, qhov chaw, thiab lub zog clamping. SCIC txiav ntug gripping system rau kev daws teeb meem automation yuav cia koj qhib cov cib fim tshiab rau kev ua haujlwm automation uas koj yeej tsis tau xav tias ua tau.

Feature

· Kev ntes qhov poob ntawm Gripper, qhov chaw tso zis tawm
· Lub zog, qhov chaw thiab qhov ceev tuaj yeem tswj tau meej los ntawm Modbus
·Lub neej ntev: kaum tawm lab lub voj voog, tshaj qhov cua claws
· Tus maub los ua ke: me me, yooj yim koom ua ke
·Hom kev tswj: 485 (Modbus RTU), I/O
Stroke yog 35 hli, Clamping Force yog 50N. Nws yog sib xws nrog 6-Axis Robot Arm.
Zaus Siab
Lub sijhawm luv tshaj plaws ntawm kev sib tsoo yog 0.5 vib nas this
Kev Ntsuas Siab
Kev rov ua dua yog ± 0.03 hli
Kev Them Nqi Siab
Kev pom zoo clamping hnyav ≤1kg
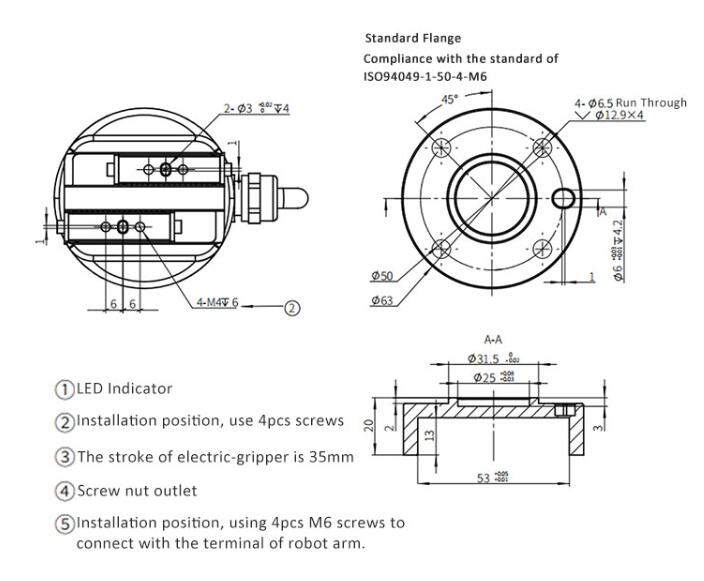
Plug thiab Ua Si
Lub tshuab hluav taws xob tshwj xeeb rau 6-axis neeg hlau
Tus Tsov Tus Hloov Tau
Nws qhov kawg ntawm tus Tsov tus tw hloov pauv tau kom haum rau ntau yam kev xav tau
Kev Clamping Mos
Nws tuaj yeem clamp cov khoom tawg yooj yim thiab deformed

● Txhawb kom muaj kev hloov pauv tshiab hauv kev hloov cov pneumatic grippers los ntawm hluav taws xob grippers, thawj lub gripper hluav taws xob nrog lub kaw lus servo hauv Suav teb.
● Hloov zoo meej rau lub tshuab cua compressor + lim + solenoid valve + throttle valve + pneumatic gripper
● Lub neej ua haujlwm ntau lub voj voog, sib xws nrog lub tog raj kheej Nyiv Pooj ib txwm muaj



Cov Lus Qhia Txog Kev Ntsuas
| Qauv No. Z-EFG-C35 | Cov Kev Cai |
| Tag nrho cov mob stroke | 35 hli hloov kho tau |
| Lub zog tuav | 15-50N kho tau |
| Rov ua dua tau | ±0.03 hli |
| Qhov hnyav tuav uas pom zoo | ≤1kg |
| Hom kev sib kis | Iav khib + Spherical qhia |
| Kev ua kom cov roj rov qab zoo ntawm cov khoom txav mus los | Txhua rau lub hlis lossis 1 lab qhov kev txav mus los / lub sijhawm |
| Lub sijhawm txav mus los ib txoj kev | 0.5 vib nas this |
| Hom kev txav mus los | Ob tug ntiv tes txav mus rau kab rov tav |
| Qhov hnyav | 0.5kg |
| Qhov Loj (L * W * H) | 63 * 63 * 95 hli |
| Kev ua haujlwm voltage | 24V ± 10% |
| Tam sim no ntsuas | 0.3A |
| Qhov siab tshaj plaws tam sim no | 1A |
| Lub zog | 8W |
| Chav kawm tiv thaiv | IP20 |
| Hom lub cev muaj zog | DC tsis txhuam |
| Qhov kub thiab txias ua haujlwm ntau yam | 5-55 ℃ |
| Kev ua haujlwm ntawm cov av noo | RH35-80 (Tsis muaj te) |

| Kev thauj khoom zoo li qub uas raug tso cai hauv kev taw qhia ntsug | |
| Fz: | 150N |
| Lub zog tso cai | |
| Mx: | 2.5 Nm |
| Kuv li: | 2 Nm |
| Mz: | 3 Nm |
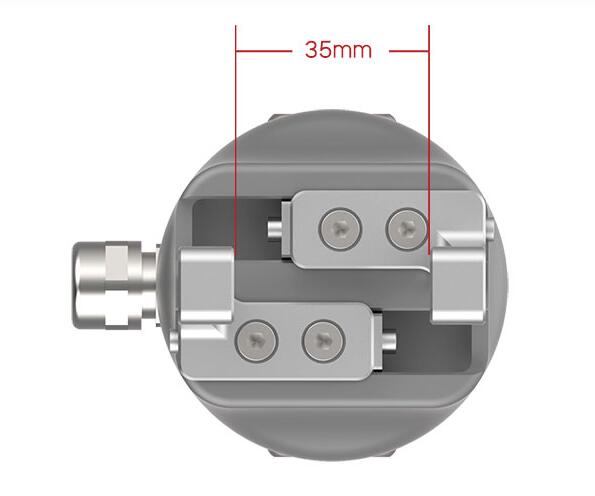
Kev Tsav Tsheb thiab Kev Tswj Xyuas Sib Koom Ua Ke Sab Hauv
Z-EFG-C35 lub tshuab hluav taws xob gripper muaj kev sib xyaw ua ke servo system sab hauv, nws tag nrho stroke yog 35mm, clamping force yog 15-50N, nws stroke thiab clamping force yog adjustable, thiab nws repeatability yog ± 0.03mm.

Sib xws nrog rau rau-Axis Robot Arm

Cov khoom no sib xws nrog 6-axis neeg hlau caj npab, kom paub txog kev ntsaws thiab ua si, lub sijhawm luv tshaj plaws tsuas yog 0.5s, kom ua tau raws li qhov yuav tsum tau ua kom ceev thiab ruaj khov rau kab ntau lawm.
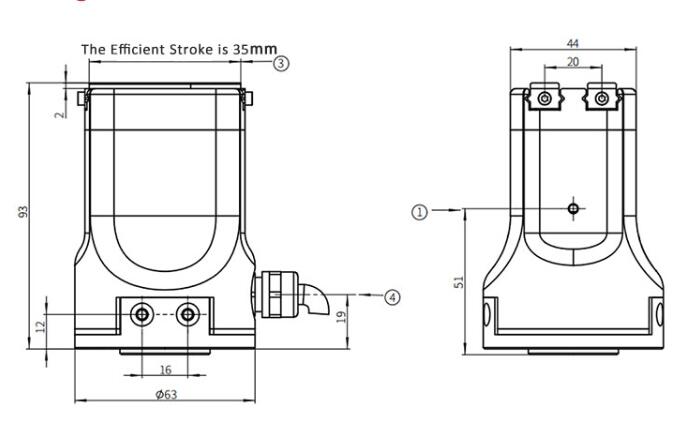
Me Me, Yooj Yim Rau Nruab

Qhov loj ntawm cov khoom Z-EFG-C35 tsuas yog L63 * W63 * H95mm xwb, nws me me, thiab muaj peev xwm teeb tsa rau hauv qhov chaw nqaim.


Kev teb sai, qhov tseeb rau kev tswj lub zog

Nws hom kev txav mus los yog 2-ntiv tes-sib luag, dej tsis nkag IP20, qhov ntawm nws lub davhlau ya nyob twg clamping tuaj yeem hloov pauv txhua lub sijhawm, cov neeg siv khoom tuaj yeem kho lub clamper raws li qhov yuav tsum tau ua ntau lawm.
Ntau Hom Kev Tswj, Yooj Yim Rau Kev Ua Haujlwm

Qhov kev teeb tsa ntawm Z-EFG-C35 yog yooj yim, muaj ntau hom kev tswj hwm, suav nrog 485 (Modbus RTU), Pulse, I/O, thiab nws sib xws nrog PLC lub kaw lus tswj hwm tseem ceeb.

Qhov Chaw Thauj Khoom ntawm Lub ntiajteb txawj nqus Offset
Peb Txoj Kev Lag Luam


Pawg khoom
-

DH ROBOTICS SERVO ELECTRIC GRIPPER PGE SERIES –...
-
-300x2551-300x300.png)
DH ROBOTICS SERVO ELECTRIC GRIPPER PGSE SERIES ...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER CG SERIES – ...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER PGE SERIES –...
-

HITBOT HLUAV TAWG HLUAV TAWG SERIES – Z-EFG-13...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER CG SERIES – ...